This video series is really helpful! I am really excited about this series and will keep posting updates to support you. I just finished the first two videos. Nice explanation of BFS and DFS on the grid.
void dfs(int u)
{
for(idx[u]; idx[u] < g[u].size(); idx[u]++)
{
int v = g[u][idx[u]];
int x = u;
int y = v;
if(x > y)
{
swap(x,y);
}
if(edge[x].find(y) == edge[x].end()) continue;
edge[x].erase(y);
--degree[u];
--degree[v];
dfs(v);
}
stck.push(u);
}
See what i did there? I created a global vector idx and did the following to track the edge being currently explored.
for(idx[u]; idx[u] < g[u].size(); idx[u]++)
When I come back, I don’t start checking ALL neighbours of vertex ‘u’. I simply continue from where I left. Hope that makes sense?
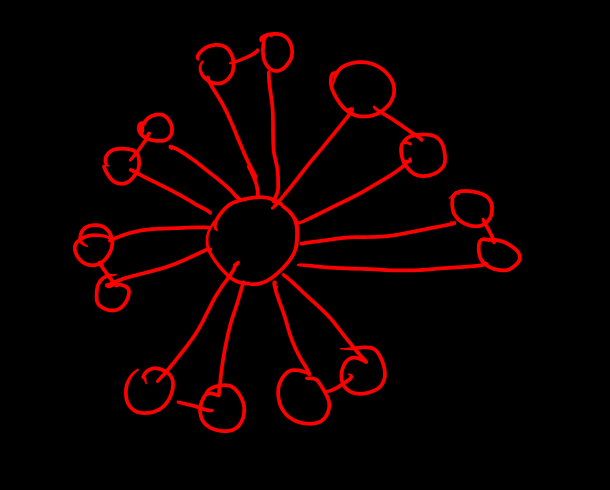
If we don’t take care of this, we will search ALL edges every time in the following case. I am calling this graph a flower-with-petal graph. Only seven petals in this graph, but imagine what happens if there are 10^5 petals (with O(N^2) complexity)
If it doesn’t I am not going to type out more here. I try to make a Eulerian Circuit video on priority and explain this aspect clearly.

")
 All Source Shortest Paths")